|
|
|
ELEKTRONISCHE KOMPONENTEN |
 |
|
|
|
|
|
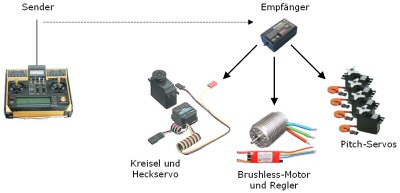
Der Betrieb eines Modellhubschraubers erfordert einen nicht unerheblichen elektronischen Aufwand, unabhängig von der Grösse des Modells und der vom Erbauer gewählten Antriebsvariante. Die Graphik zeigt die wichtigsten der vielen elektronischen Komponenten am Beispiel eines Modellhubschraubers mit Elektroantrieb.
Folgende Kapitel vertiefen die Thematik:
(Details zur Turbinenelektronik finden sich im Kapitel Das Modell -> Das Triebwerk )
|
|
|
Sender und Empfänger
Zum Steuern des Modells und seiner Zusatzfunktionen steht dem Modellpiloten eine mehrkanalige Funkfernsteuerung zur Verfügung, die üblicherweise in einem speziell für den Modellflug reservierten Bereich des 35 MHz Bandes arbeitet. Dem Piloten stehen verschiedene Proportionalgeber (z.B. Steuerknüppel, Schiebe- oder Drehregler) sowie Schalter und Taster zur Verfügung, deren Eingangssignale auf verschiedenen Kanälen zum Modell übertragen werden.
|
|
|
|
|
Der im Modell befindliche Empfänger wertet die einzelnen Kanäle und deren Steuerinformationen aus und leitet die verschiedenen Signale an die entsprechenden Senken (wie Servos, Kreisel und sonstige elektronische Systeme) weiter.
|
|
|
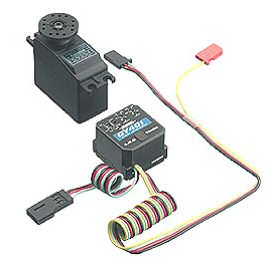
Der Heckrotorkreisel
Der Kreisel unterstützt den Modellpiloten bei der Steuerung des Heckrotors, indem er ungewollte Bewegungen des Hecks, die z.B. vom Seitenwind oder von Drehmomentänderungen am Hauptrotor herrühren, dämpft bzw. gänzlich unterdrückt.
|
|
|
|
|
Während es in den Anfangszeiten der Modellhubschrauberei nur mechanische Kreisel gab, in deren Innern eine Scheibe rotierte, sind heutige Kreiselsysteme vollelektronisch mit Halbleiterelementen aufgebaut. Doch auch im Halbleiterbereich schreitet die Entwicklung voran: die noch vor wenigen Jahren eingesetzten piezokeramischen Elemente weichen nach und nach den noch präziseren und unempfindlicheren SMM*-Elementen. Bei modernen Kreiseln kann der Pilot vom Sender aus die Empfindlichkeit einstellen und zwischen zwei verschiedenen Arbeitsmodi wechseln:
1. Normal-Modus: der Kreisel reagiert auf die Stärke der Heckstörung mit einem proportional dazu erzeugten Steuerbefehl, d.h. je stärker das Heck z.B. durch eine Windböe weggedrückt wird, desto stärker ist der vom Kreisel erzeugte entgegen wirkende Steuerbefehl. Da der Kreisel eine Heckbewegung erst dann registrieren kann, wenn sie bereits erfolgt ist, kann ein im Proportional modus betriebener Kreisel Heckbewegungen nur dämpfen, nicht jedoch rückgängig machen.
2. Heading-Hold-Modus: in diesem Modus integriert der Kreisel die Stärke der Störung über der Zeit, hiermit kann er auf die Winkelstrecke schliessen und das Heck in exakt diejenige Position zurücksteuern, in der es sich vor der Störung befunden hat. Bei einem mit Heading-Hold gesteuerten Modellhubschrauber scheint das Heck selbst im schnellen Rückwärtsflug wie angenagelt in der Luft zu stehen. Hierdurch ergeben sich speziell für das 3D-Fliegen völlig neue Möglichkeiten.
(* SMM = Silicium Micro Machine)
|
|
|
Servos - präzise und schnelle Stellmotoren
Servos wandeln die elektronischen Steuersignale des Empfängers in Bewegung um. Sie werden beim Modellhubschrauber für die Steuerung der Blattanstellwinkel von Haupt- und Heckrotor sowie für diverse Zusatzfunktionen (z.B. Einziehfahrwerk, etc.) benötigt.
|
|
|
|
|
Bei Hubschraubern mit Verbrennungsmotor kommt darüber hinaus ein weiteres Servo zur Einstellung des Vergasers zum Einsatz. Die seit kurzer Zeit auf dem Markt befindlichen Digital - Servos arbeiten mit Motoren, die im Vergleich zu den bisherigen Analog-Servos größeren Haltekräfte aufbringen und deutlich schneller reagieren. So liegt die durchschnittliche Stellzeit für eine 45° Drehung des Ruderarms zwischen 50 und 150 Millisekunden.
|
|
|
Der Drehzahlregler
Grundvoraussetzung für präzises Fliegen mit einem Modellhubschrauber ist eine konstante Systemdrehzahl von Haupt- und Heckrotor. Die Drehzahl bleibt jedoch nur dann konstant, wenn die Motorleistung exakt der vom Modell im jeweiligen Moment benötigten Leistung entspricht.
|
|
|
|
|
Möglich wird dies z.B. in der Fernsteuerung durch eine elektronische Mischung zwischen den Servos für Pitch- und Motorleistung. Teilweise wird zusätzlich im Modell ein Drehzahlregler eingesetzt, der über einen Sensor am Motor oder am Hauptrotorgetriebe die aktuelle Drehzahl erfasst, mit der vorgegebenen vergleicht und über einen Regelkreis Korrekturen einsteuert.
Einen Sonderfall stellt in der Sparte der Elektromotoren der immer weiter verbreitete Drehstrommotor dar (auch als Brushless-Motor bezeichnet). Bei dieser Antriebsvariante bekommt der Motor vom Regler keine Leistung vorgegeben, sondern ein sich drehendes magnetisches Feld (Helikoptermodus). Der Motor folgt diesem bewegten Feld und nimmt sich die dafür benötigte Leistung selbständig aus der Spannungsquelle. Dieser Antrieb ist für Modellhubschrauber insofern prädestiniert, als dass eine konstante Drehzahl (innerhalb der Leistungsgrenzen) prinzipbedingt auch ohne Regelkreis gewährleistet ist.
zurück nach oben
|